
ORYGINALNY ARTYKUŁ Z BADAŃ
15 stycznia 2020 | https://doi.org/10.3389/fneur.2019.01344
Wpływ treningu chodu w egzoszkielecie na równowagę, rozkład obciążenia oraz status funkcjonalny w udarze: losowa kontrolowana próba.
Anna Rojek1,**, Anna Mika2*,**, Łukasz Oleksy3,4, Artur Stolarczyk5 i Renata Kielnar6
- 1 Klinika Fizjoterapii RehaPlus, Kraków, Polska.
- 2 Zakład Rehabilitacji Klinicznej, Akademia Wychowania Fizycznego w Krakowie, Kraków, Polska.
- 3 Centrum Fizjoterapii i Sportu, Politechnika Rzeszowska, Rzeszów, Polska.
- 4 Nauki Medyczne i Sportowe Oleksy, Łańcut, Polska.
- 5 Zakład Ortopedii i Rehabilitacji,Warszawski Uniwersytet Medyczny,Warszawa, Polska.
- 6 Medyczna Szkoła Wyższa Uniwersytetu Rzeszowskiego, Rzeszów, Polska.
Wstęp: W wyniku udaru mózgu pacjenci mają problemy z poruszaniem się i przemieszczaniem, co
prowadzi do występowania częstych upadków. Powrót do zdrowia po udarze jest głównym celem
rehabilitacji, ale trudno jest wybrać, która metoda leczenia jest najbardziej korzystna dla osób po
udarze. Ostatnio zasilane robotyczne egzoszkielety są stosowane w leczeniu w celu maksymalizacji
regeneracji nerwowej pacjentów po udarze, ale nie ma badań oceniających zmiany równowagi między
pacjentami rehabilitowanymi z pomocą egzoszkieletu.
Cel: Celem tego badania była ocena wpływu treningu chodu wspomaganego egzoszkieletem Ekso GT
na równowagę, rozkład obciążenia i stan funkcjonalny pacjentów po udarze niedokrwiennym.
Metody: Wyniki oparto na 44 pacjentach w wieku 55–85 lat po udarze niedokrwiennym, którzy
wcześniej zostali losowo przydzieleni do dwóch grup: eksperymentalnej (z rehabilitacją Ekso GT) i
kontrolnej (z rehabilitacją klasyczną). Na początku i po 4 tygodniach leczenia pacjentów oceniano pod
kątem równowagi, rozkładu obciążenia i stanu funkcjonalnego, stosując odpowiednio platformę
stabilometryczną, Indeks Barthel i Indeks Mobilności Rivermead.
Wyniki: W grupie eksperymentalnej poprawiono równowagę w odniesieniu do zmiennych
opisujących obszar wychylenia jako osie główne i podrzędne elipsy. W grupie kontrolnej odnotowano
poprawę prędkości wychylenia. Po terapii całkowity rozkład obciążenia na stopy w obu grupach
wykazywał niewielką i nieznaczną tendencję do zmniejszania ilości niezaangażowanych kończyn.W
grupie kontrolnej odnotowano znaczny transfer obciążenia z tylnej części stopy na przednią część
stopy. Obie formy rehabilitacji spowodowały istotne zmiany stanu funkcjonalnego.
Wnioski: Zarówno trening z wykorzystaniem egzoszkieletu Ekso GT, jak i klasyczna fizjoterapia
prowadzą do poprawy funkcjonalnej pacjentów po udarze niedokrwiennym. Jednak w grupie
eksperymentalnej zaobserwowano poprawę w większej liczbie kategorii, co może sugerować
potencjalnie większy wpływ leczenia egzoszkieletem na stan czynnościowy. Obie formy rehabilitacji
spowodowały również znaczące zmiany w równowadze, ale zauważyliśmy pewne trendy wskazujące, że
leczenie egzoszkieletem może być bardziej korzystne dla niektórych pacjentów. Przeniesienie
obciążenia z tylnej części stopy do przedniej części stopy obserwowane w grupie kontrolnej było
zjawiskiem niekorzystnym. Sugerujemy, że egzoszkielet Ekso GT może być obiecującym narzędziem w
rehabilitacji pacjentów po udarze.
Rejestracja próbna: ID próbne ACTRN12616000148471
Wprowadzenie
Udar jest trzecią wiodącą przyczyną zgonów na świecie i jest najczęstszą przyczyną niepełnosprawności
wśród osób dorosłych (1, 2).W wyniku udaru pacjenci mają problemy z poruszaniem się i
przemieszczaniem, co prowadzi do częstych upadków. Osoby z hemiparezą mają nierównomierny
rozkład masy ciała między bokami ciała, powodując zaburzenia równowagi i koordynacji, głębokie i
powierzchowne uczucie, zwiększone napięcie mięśniowe i strach przed upadkiem (2, 3). Pacjenci mają
problemy z brakiem normalnego napięcia mięśni posturalnych i prawidłowym wzajemnym
unerwieniem, a także normalnymi, automatycznymi wzorami ruchowymi i reakcjami równowagi (4).
Niektóre badania donoszą, że zmiany równowagi znacznie ograniczają aktywność fizyczną pacjentów
po udarze, co może być przyczyną dekondycjonowania pacjentów w fazie przewlekłej i zmniejszenia ich
możliwości chodu, a także innych czynności życia codziennego (5). Dlatego rehabilitacja chodu, a także
terapia równowagowa są bardzo ważne dla poprawy jakości życia codziennego i społecznego tych
pacjentów (6).
Trening chodu może poprawić nie tylko siłę, wytrzymałość i koordynację kończyn dolnych, ale także
całego ciała pacjenta, wpływając na ogólną sprawność i wytrzymałość, równowagę, normalizację
napięcia mięśniowego i poprawę funkcjonalną (7). Testy Barthel Index (BI) i Rivermead Mobility
Index (RMI) są uważane za właściwe kryteria oceny stanu funkcjonalnego pacjenta po udarze i dobre
wskaźniki skuteczności zastosowanej terapii (8, 9).
Powrót do zdrowia po udarze jest głównym celem rehabilitacji, ale trudno jest wybrać, która metoda
leczenia jest najbardziej korzystna dla osób po udarze. Ostatnio zasilane robotyczne egzoszkielety są
stosowane w leczeniu w celu maksymalizacji regeneracji nerwowej pacjentów po udarze (10, 11).
Jednak w artykule przeglądowym Louie i Eng (12) podali, że badano tylko cztery różne rodzaje
egzoszkieletów z napędem u niewielkiej liczby pacjentów z udarem, a opublikowane dane były
kontrowersyjne. Ponadto w dostępnej literaturze nie ma badań oceniających zmiany równowagi
między pacjentami rehabilitowanymi egzoszkieletem. Większość autorów zgłosiła różne aspekty
chodzenia, a tylko kilka artykułów przedstawiło dane dotyczące zmian równowagi. Ponadto w
większości badań wykorzystano narzędzia subiektywne, takie jak skala równowagi Berga (13, 14).
Brakuje badań, w których zmiany równowagi i rozkładu obciążenia wynikające z rehabilitacji
egzoszkieletem byłyby badane przy użyciu obiektywnego narzędzia – platformy stabilometrycznej;
dlatego niniejsze badanie podejmuje to zadanie po raz pierwszy.
Celem tego badania była ocena skuteczności rehabilitacji egzoszkieletem Ekso GT u pacjentów po
udarze niedokrwiennym oraz porównanie tego rodzaju terapii z klasycznym modelem rehabilitacji.
Nowością tego badania była weryfikacja efektów treningu chodu wspomaganego robotem dla
równowagi, rozkładu obciążenia i stanu funkcjonalnego pacjentów po udarze.
Materiały i metody
Uczestnicy
To randomizowane kontrolowane badanie obejmowało grupę 44 uczestników (19 kobiet i 25 mężczyzn)
w wieku 55–85 lat (69 ± 7) po incydencie z udarem niedokrwiennym mózgu, które miało miejsce nie
wcześniej niż 1 rok przed włączeniem do badania (ryc. 1). Pacjentów rekrutowano z trzech szpitali z
oddziałem lub podjednostką rehabilitacji neurologicznej.
Rys. 1
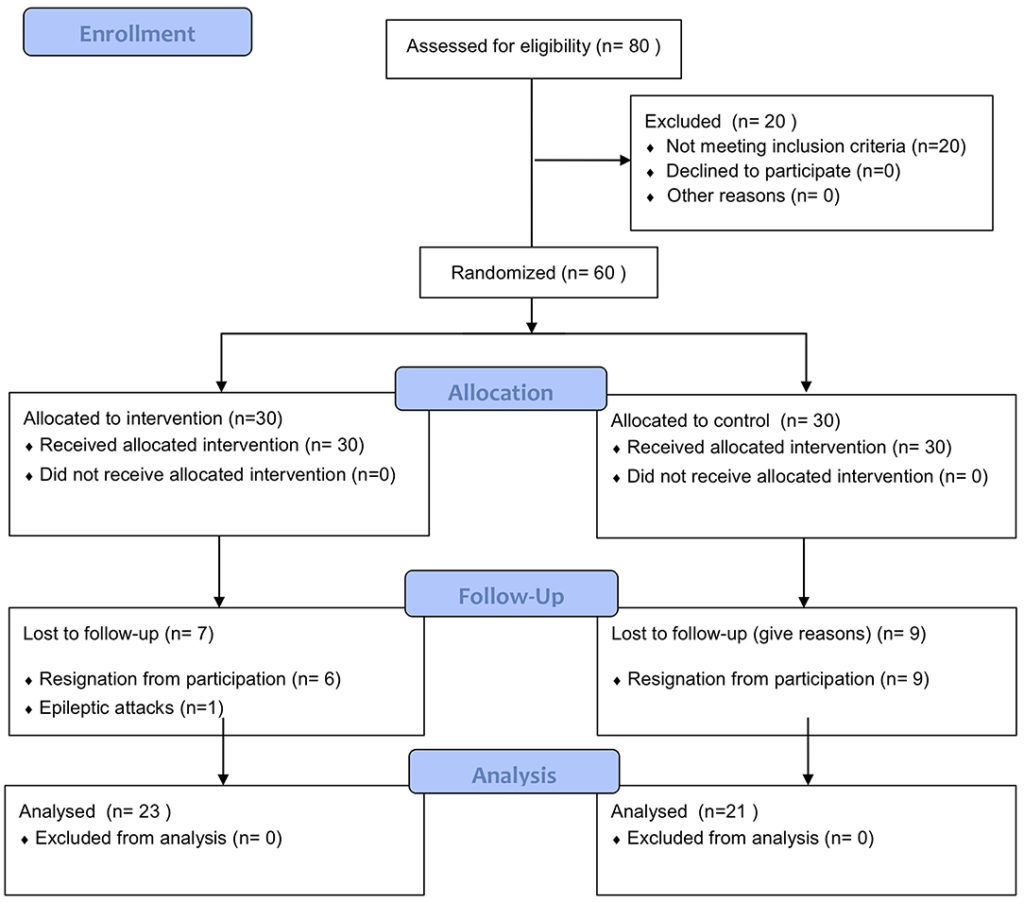
Rys. 1. Schemat przepływu CONSORT.
Charakterystykę pacjenta przedstawiono w tabeli 1. Pacjentów losowo podzielono na dwie grupy:
• Grupa 1 (eksperymentalna): n = 23, w tym pacjenci poddani rehabilitacji egzoszkieletem Ekso GT
• Grupa 2 (kontrola): n = 21, w tym pacjenci poddani klasycznej rehabilitacji po udarze.
Tabela 1

Tabela 1. Charakterystyka pacjentów.
Kryteria wykluczenia są następujące:
• Drugi lub kolejny incydent udaru mózgu.
• Dysproporcja w długości kończyn dolnych> 2 cm.
• Wyleczone przykurcze kości i stawów oraz deformacje stawów.
• Zmiany zapalne na skórze i otwarte zmiany skórne w okolicy tułowia lub kończyn dolnych.
• Spastyczność mięśni kończyn dolnych> 3 zgodnie ze Zmodyfikowaną Skalą Ashwortha.
• Afazja uniemożliwiająca komunikację z pacjentem.
• Ciężka niedowidzenie lub utrata słuchu.
• Ograniczenie zakresu ruchu kończyn dolnych, które ogranicza pełną pozycję stojącą w egzoszkieletu lub uniemożliwia mu przejście z pozycji stojącej do siedzącej i odwrotnie.
• Brak wystarczającej siły w kończynach górnych, co ogranicza zdolność pacjenta do utrzymania równowagi podczas chodzenia z chodzikiem lub kulami.
• Zmniejszona tolerancja stojąca z powodu niedociśnienia ortostatycznego.
• Ciężka osteoporoza uniemożliwiająca pacjentowi przyjęcie bezpiecznej pozycji stojącej lub potencjalnie zwiększająca ryzyko złamania podczas stania lub chodzenia.
Procedura kwalifikacyjna obejmowała:
a) Kwalifikacje medyczne
Pacjenci z obu grup zostali poddani kwalifikacjom medycznym prowadzonym przez lekarza specjalistę,
który stwierdził, że nie ma przeciwwskazań do rehabilitacji fizycznej.
b) Kwalifikacja pacjentów do treningu z egzoszkieletem Ekso GT
Za tę kwalifikację odpowiedzialny był fizjoterapeuta, który operował egzoszkieletem.
Obejmował następujące pomiary:
• Zakres ruchu w stawach barkowych, łokciowych, nadgarstkowych, biodrowych, kolanowych i skokowych
• Spastyczność mięśni odpowiedzialna za ruchy w stawach barkowych, łokciowych, nadgarstkowych, biodrowych, kolanowych i skokowych za pomocą zmodyfikowanej skali Ashwortha
• Stan skóry (kontrola obecności otarć, ran itp.)
• Liniowe pomiary szerokości bioder oraz uda i długości dolnej nogi
• Zbiór historii dotyczących stanu zdrowia pacjenta, w tym innych problemów medycznych, takich jak obecność niedociśnienia ortostatycznego lub osteoporozy.
Pacjenci zostali szczegółowo poinformowani o protokole badań i wyrazili pisemną zgodę na udział w badaniu. Jeśli pacjent nie był w stanie podpisać go osobiście, członek rodziny zrobił to w swoim imieniu. Przed badaniem uzyskano zgodę Komisji Etycznej Okręgowej Izby Lekarskiej w Krakowie. Przed rozpoczęciem interwencji pacjenci zostali losowo przydzieleni do grupy eksperymentalnej lub kontrolnej przez niezależnego badacza przy użyciu metody zamkniętych kopert.
Procedury eksperymentalne
Wszystkie pomiary zostały przeprowadzone dwukrotnie, na początku i po 4 tygodniach terapii przez zaślepionego badacza.
Ocena równowagi i rozkładu obciążenia
Pomiary wykonano przy użyciu platformy barorezystancyjnej Zebris FDM-S (producent: Zebris, Niemcy), co pozwoliło nam zbadać równowagę i rozkład obciążenia między prawą i lewą stopą, odpowiednio dla przedniej i tylnej części stopy. Platforma zastosowana w tym badaniu była barorezystancyjna w swojej konstrukcji, ponieważ ma czujniki barorezystancyjne. Ale działała stabilometrycznie, ponieważ mierzy równowagę i rozkład obciążenia w działaniach statycznych i dynamicznych. Kalibracja platformy została przeprowadzona przed zebraniem danych na podstawie instrukcji producenta. Podczas pomiaru pacjent stoi boso, pionowo na środku platformy, z rękami
wyciągniętymi na boki w zrelaksowanej, nawykowej pozycji, pozostając w bezruchu przez 30 sekund i patrząc prosto przed siebie. Pomiar powtórzono dwukrotnie: pierwszy raz z otwartymi oczami i drugi z zamkniętymi oczami. Pomiędzy pomiarami pacjent spoczywał w pozycji siedzącej tak długo, jak potrzebował. Podczas badania pacjenci nie widzieli monitora komputerowego wyświetlającego wartości obciążenia prawej i lewej stopy.
Oceniane zmienne są następujące:
Elipsa została zdefiniowana jako 95% obszaru ufności wokół obszaru wychylenia środka ciężkości (COP) całego ciała (mm2).
– Długość ścieżki COP (mm) – długość ścieżki wahania.
– średnia prędkość COP (mm / s).
– Długość mniejszej osi (mm) – szerokość elipsy.
– Długość głównej osi (mm) – wysokość elipsy.
– Kąt między osią Y i głównymi (stopniami) – kąt elipsy: wskazuje orientację kierunku osi wzdłużnej względem elipsy w porównaniu do osi wzdłużnej platformy.
– Odchylenie COP X (mm) – odchylenie standardowe poziome COP
– Odchylenie COP Y (mm) – odchylenie standardowe pionowe COP.
Rozkład obciążenia pod stopami mierzono jako siłę niutona na centymetr kwadratowy działający na czujniki płytkowe. Rozkład obciążenia między lewą i prawą częścią stopy wyrażono w procentach.
– Całkowite obciążenie (%) – średni procentowy rozkład ciężkości lewej i prawej części stopy.
– Obciążenie przedniej części stopy (%) – średni procentowy rozkład ciężkości lewej i prawej przedniej części stopy.
– Obciążenie tylnej części stopy (%) – średni procentowy rozkład ciężkości dla lewej i prawej tylnej części stopy.
Ocena stanu funkcjonalnego
Wskaźnik mobilności Rivermead
RMI określa stopień niepełnosprawności i mobilności pacjentów po udarze, testując zdolności
funkcjonalne, takie jak chód, równowaga lub przemieszanie. Wynik końcowy 0 oznacza, że badana
osoba nie jest w stanie poprawnie wykonać żadnej z badanych czynności i wykazuje wysoki stopień
niepełnosprawności (15, 16). Wcześniej zgłaszana wiarygodność RMI między oceniającymi i między
oceniającymi była doskonała [współczynniki korelacji wewnątrzklasowej (ICC) 0,97 i 0,99] (17,18).
Wskaźnik Barthel
Wskaźnik BI (Barthel Indeks) wykorzystano do określenia stanu funkcjonalnego badanych pacjentów na podstawie konkretnych codziennych czynności. Skala jest odzwierciedleniem tego, co pacjent jest w stanie zrobić, a celem jego zastosowania jest określenie stopnia niezależności pacjenta.W tym teście pacjenci mogą uzyskać maksymalnie 100 punktów (19, 20). Wcześniej zgłoszona ICC reprezentująca wiarygodność między ocenami dla BI wyniosła 0,99. Dla wiarygodności wewnątrzrynkowej wartość ICC wyniosła 0,99 (21).
W obu kwestionariuszach pacjenci odpowiadali na pytania w jak największym stopniu. W przypadku zaburzeń mowy lub poznawczych odpowiedzi udzielili krewni, opiekunowie lub terapeuci pracujący z pacjentem.
Czas marszu i liczba kroków monitorowanych za pomocą egzoszkieletu Ekso GT
W grupie eksperymentalnej funkcje monitorowane przez egzoszkielet Ekso GT podczas terapii mierzono na początku i po każdym tygodniu terapii: czas marszu i liczbę kroków wykonanych podczas chodu w egzoszkieletu.
Interwencje terapeutyczne
W obu grupach rehabilitację prowadzono pięć razy w tygodniu przez 4 tygodnie. Każdy pacjent był
poddawany terapii codziennie przez tego samego licencjonowanego fizjoterapeutę. Dawka terapeutyczna była równa między dwiema grupami.
Grupa eksperymentalna
Pacjentów trenowano przy użyciu egzoszkieletu Ekso GT. Czas trwania pojedynczej sesji terapeutycznej wynosił 45 minut. Oprócz treningu chodu z egzoszkieletem Ekso GT pacjenci z tej grupy poddawani byli terapii zajęciowej i indywidualnie dobranej fizykoterapii przez 60 minut / dzień.
Na trening pacjenta przyprowadzono z pomocą lub, w razie potrzeby, na wózku inwalidzkim. Przede wszystkim pacjent został przeniesiony na krzesło (wysokość krzesła: 47 cm), na którym znajdował się wcześniej dopasowany egzoszkielet – z odpowiednio dopasowaną częścią na uda i dolne partie kończyn dolnych dla pacjenta. Urządzenie przymocowano do ciała pacjenta i rozpoczęto terapię. Pacjent został ustawiony pionowo przez urządzenie; potem rozpoczął się trening chodu. Miało to miejsce na płaskiej powierzchni – wzdłuż korytarza szpitala. W przypadku zmęczenia pacjent miał możliwość odpoczynku na krześle. Pierwsza sesja terapeutyczna polegała na przesunięciu masy ciała na boki. Trening został zakończony, gdy zmęczenie pacjenta było zbyt duże lub po upływie 45 minut.
Parametry chodu były monitorowane i, jeśli to konieczne, modyfikowane i dostosowywane do potrzeb, a także indywidualnych możliwości pacjentów. Funkcja egzoszkieletu „Variable Assist” była używana tak często, jak to możliwe. Jest to program adaptacyjny wspierający obie strony ciała, w którym prawą i lewą stronę można kontrolować niezależnie, umożliwiając niezależne podparcie każdej kończyny u pacjenta po udarze. Wartość wsparcia można ustawić automatycznie lub ręcznie1.
Grupa kontrolna
Pacjenci z grupy kontrolnej byli poddawani klasycznej rehabilitacji, która obejmowała indywidualne ćwiczenia z terapeutą, pionizację i chód (45 minut); ćwiczenia grupowe poprawiające ogólną sprawność; terapia zajęciowa; i indywidualnie wybrane elementy fizykoterapii (60 minut). Pacjent został zabrany na siłownię, gdzie indywidualnie pracował z fizjoterapeutą. Pacjent wykonał ćwiczenia na stole terapeutycznym w celu wzmocnienia tułowia i kończyn dolnych, a następnie przeniósł się do wyższych pozycji, takich jak siedzenie na stole lub stanie, w zależności od bieżących możliwości. Ćwiczył także równowagę i uczył się chodzić na płaskiej powierzchni, z pomocą terapeuty. Jeśli stan pacjenta na to pozwalał, po zakończeniu ćwiczeń udał się na trening na rowerze stacjonarnym, gdzie opór był dostosowany do własnych możliwości pacjenta. Następnie pacjent przeszedł na fizykoterapię (głównie elektrostymulację i wannę z hydromasażem). Po tych zabiegach pacjent uczestniczył w zajęciach terapii zajęciowej.
Analiza statystyczna
Analizę statystyczną przeprowadzono przy użyciu oprogramowania STATISTICA 12.0.PL. Normalność rozkładu zmiennych w grupach sprawdzono za pomocą testu Shapiro –Wilka. Istotność zmian w równowadze i rozkładzie obciążenia określono za pomocą dwustronnej analizy ANOVA (grupa ANOVA × czas). Zmiany zmiennych oceny stanu funkcjonalnego (wskaźnik BI i RMI) oceniono za pomocą nieparametrycznego testu chi-square. Korekcję Bonferroniego zastosowano do wielu porównań. Wielkość efektu obliczono za pomocą d Cohena, przeanalizowano i omówiono zgodnie z wcześniejszymi badaniami (22–24). Różnice uznano za statystycznie istotne, jeśli poziom prawdopodobieństwa testu był niższy niż przyjęty poziom istotności (p <0,05).W sparowanej analizie mocy testu t wpływu wysiłku stwierdzono, że co najmniej 20 osób było wymaganych do uzyskania mocy 0,8 na poziomie dwustronnym 0,05 przy wielkości efektu d = 0,6. Analizę oparto na danych pochodzących z wcześniejszej literatury (25, 26).
Wyniki - Równowaga i rozkład obciążenia
Równowaga z otwartymi oczami
Długość ścieżki COP w obu grupach nie zmieniła się znacząco po terapii (p> 0,05). Jednak w grupie kontrolnej zauważalna była tendencja do zwiększania długości ścieżki z silnym rozmiarem efektu (ES = 0,7). Znaczącą różnicę zaobserwowano po terapii między badanymi grupami. Średnia prędkość COP nie zmieniła się znacząco w żadnej z grup (p> 0,05), ale istniała znacząca różnica między grupami po leczeniu z tendencją do wzrostu w grupie kontrolnej (ES = 0,74). Po terapii w grupie eksperymentalnej zauważono nieistotną tendencję wykazującą poprawę w mniejszej osi elipsy (ES = 0,54) i większej osi elipsy (ES = 0,41), podczas gdy w kontroli, nieistotna tendencja do pogorszenia się tych zaobserwowano parametry (ES = 0,89; ES = 0,76). Odchylenie COP X (w płaszczyźnie czołowej) w grupie eksperymentalnej znacznie się poprawiło, podczas gdy w grupie kontrolnej trend był w
przeciwnym kierunku (ES = 0,34). Odchylenie COP Y (w płaszczyźnie strzałkowej) w grupie eksperymentalnej znacznie się poprawiło, podczas gdy w grupie kontrolnej pozostało niezmienione (p> 0,05) (Tabela 2).
Tabela 2

Tabela 2.
Porównanie równowagi i rozkładu obciążenia przy otwartych oczach w punkcie początkowym i po terapii.
Równowaga z zamkniętymi oczami
Długość ścieżki COP i prędkość COP nie zmieniły się znacząco po terapii w grupach (p> 0,05). Długość mniejszej i głównej osi elipsy w obu grupach nie zmieniła się znacząco (p> 0,05). Ale w grupie eksperymentalnej zaobserwowano tendencję do poprawy (ES = 0,65). Również po terapii różnica między grupami była nieistotna, ale z wielkością efektu (ES = 0,60). Odchylenie COP X (w płaszczyźnie czołowej) w obu grupach nie zmieniło się znacząco (p> 0,05). Odchylenie COP Y (w płaszczyźnie strzałkowej) wykazało niższe wartości po terapii, ale zmiana była znacząca tylko w grupie kontrolnej (ES = 0,86). Istniała także znacząca różnica między grupami po terapii (ES = 1,09) (Tabela 3).
Tabela 3

Tabela 3. Porównanie równowagi i rozkładu obciążenia z oczami zamkniętymi na początku i po terapii.
Rozkład obciążenia z otwartymi oczami
Całkowity rozkład obciążenia w obu grupach nie zmienił się znacząco po terapii (p> 0,05). Po terapii obciążenie przodostopia w obu grupach nie zmieniło się znacząco (p> 0,05), ale w grupie kontrolnej zaobserwowano nieistotną tendencję do zwiększenia obciążenia przedniej części stopy zarówno u zaangażowanych (ES = 0,46), jak i niezaangażowanych (ES = 0,44) strony. Istniała także znacząca różnica między grupami po terapii po stronie niezaangażowanej (ES = 1,10). Po terapii, w grupie kontrolnej, obciążenie tylnej części stopy wykazało nieistotną tendencję do zmniejszania obciążenia po zaangażowanych (ES = 0,41) i niezaangażowanych (ES = 0,33) stronach. Istniała także znacząca różnica między grupami po terapii (ES = 1,02) (Tabela 2).
Rozkład obciążenia z zamkniętymi oczami
Nie stwierdzono istotnych różnic w grupach eksperymentalnych i kontrolnych między wartościami wyjściowymi i całkowitymi obciążeniem po terapii (p> 0,05) lub między grupami po 4 tygodniach leczenia (p> 0,05). Obciążenie przedniej części stopy wzrosło po terapii zarówno po stronie zaangażowanej (ES = 0,41), jak i niezaangażowanej (ES = 0,52).W grupie eksperymentalnej nie stwierdzono istotnych zmian po leczeniu (p> 0,05). Różnice między grupami były nieistotne po terapii, ale z silnym rozmiarem efektu w odniesieniu do niezaangażowanych (ES = 0,91) i zaangażowanych (ES = 0,58) stron. Zwiększone obciążenie przedniej części stopy pojawiło się jednocześnie ze zmniejszonym obciążeniem tylnej części stopy. Nieznaczny trend odnotowano w grupie kontrolnej z ES = 0,46 dla zaangażowanej strony i ES = 0,52 dla niezaangażowanej strony. Po terapii różnice między grupami
były znaczące dla strony niezaangażowanej (ES = 0,91) i nieistotne dla zaangażowanej strony (ES = 0,58) (Tabela 3).
Ocena stanu funkcjonalnego
Wskaźnik Barthel
Pomimo faktu, że badanie było randomizowane, wyniki wykazały pewne znaczące różnice między grupami na początku na korzyść grupy kontrolnej. Po terapii zaobserwowano znaczną poprawę we wszystkich kategoriach w grupie eksperymentalnej, podczas gdy w grupie kontrolnej znaczące zmiany odnotowano tylko dla trzech kategorii BI. Ponadto zaobserwowano znaczące różnice między grupami na początku w niektórych kategoriach i po terapii, ale ogólnie poprawa stanu czynnościowego była silniejsza w grupie eksperymentalnej (Tabela 4)
Tabela 4

Tablica 4. Porównanie wskaźnika Barthel na początku i po terapii.
Wskaźnik mobilności Rivermead
Podobnie, jak zaobserwowano w przypadku BI, wyniki RMI wykazały pewne znaczące różnice między grupami na początku na korzyść grupy kontrolnej. Po terapii zaobserwowano znaczną poprawę w grupie eksperymentalnej dla większości kategorii, podczas gdy w grupie kontrolnej znaczące zmiany odnotowano tylko dla pięciu kategorii RMI. Również znaczące różnice między grupami zaobserwowano po terapii, ale ogólnie poprawa stanu czynnościowego była silniejsza w grupie eksperymentalnej (Tabela 5).
Tabela 5

Tabela 5. Porównanie wskaźnika mobilności Rivermead na początku i po terapii.
Czas marszu i liczba kroków monitorowanych za pomocą egzoszkieletu Ekso GT
W grupie eksperymentalnej podczas 2 tygodni leczenia egzoszkieletem Ekso GT czas marszu znacznie się wydłużył, a następujący znaczący wzrost zaobserwowano po trzecim i czwartym tygodniu treningu (ryc. 2A). Podobne zmiany odnotowano w liczbie kroków wykonanych przez pacjentów podczas sesji treningowej. Znaczący wzrost zaobserwowano po 2 tygodniach, a następnie wzrost po trzecim i czwartym tygodniu (ryc. 2B).
Rys. 2

Rys 2. Zmiany czasu marszu (A) i liczby kroków (B) monitorowanych za pomocą Ekso GT podczas terapii w grupie eksperymentalnej. p — wartość p pomiędzy wartością początkową a 2, 3 i 4 tygodniem terapii.
Dyskusja
Najważniejsze obserwacje z tego badania były takie, że zarówno trening egzoszkieletu Ekso GT, jak i zastosowanie klasycznej fizjoterapii doprowadziły do poprawy funkcjonalnej pacjentów po udarze niedokrwiennym. Obie formy rehabilitacji spowodowały istotne zmiany w równowadze i stanie funkcjonalnym. Żadna z zastosowanych metod nie była jednak wyraźnie lepsza od drugiej. Zauważyliśmy pewne trendy pokazujące, że leczenie egzoszkieletem może być bardziej korzystne u niektórych pacjentów.W grupie eksperymentalnej poprawiła się równowaga mierzona przy otwartych oczach, szczególnie w odniesieniu do zmiennych opisujących obszar wychylenia jako główne i mniejsze osie elipsy. Ale u tych pacjentów po 4 tygodniach leczenia egzoszkieletem nie zaobserwowaliśmy wzrostu prędkości wychylenia, co może wskazywać na łagodną stymulację reakcji naprawczych układu
nerwowego. Zmiany parametrów równowagi były bardziej wyraźne w przypadku oczu otwartych niż oczu zamkniętych. Z drugiej strony w grupie kontrolnej odnotowano przeciwne zmiany. Po 4 tygodniach terapii zaobserwowano wzrost głównych i mniejszych osi elipsy, co wskazuje na pogorszenie równowagi statycznej, ale ze znacznym wzrostem prędkości wychylenia. Analiza rozkładu obciążenia na stopach z otwartymi i zamkniętymi oczami w obu grupach wykazała niewielką i nieistotną tendencję do zmniejszania ilości niezaangażowanego obciążenia kończyny po terapii, co może wskazywać na stopniową poprawę symetrii obciążenia kończyny. Jednak w grupie kontrolnej zauważyliśmy przeniesienie obciążenia z tylnej części stopy do przedniej części stopy, co nie jest korzystne i wskazuje na patologiczne wzorce obciążenia kończyn dolnych. Nie zaobserwowano tego w grupie eksperymentalnej, co może wskazywać, że po treningu z egzoszkieletem rozkład obciążenia w kończynach był lepszy niż po klasycznej rehabilitacji. Jak podano, odpowiedni rozkład obciążenia powinien wynosić 33% obciążenia stopy w tył i 66% obciążenia stopy w przód (27). Ponadto w wyniku treningu z egzoszkieletem pacjenci znacznie zwiększyli odległość marszu i liczbę kroków wykonanych podczas jednostki treningowej. Wzrost obciążenia przedniej części stopy po 4 tygodniach terapii obserwowany w grupie kontrolnej
może wskazywać na wzrost napięcia mięśnia trójgłowego łydki i występowanie spastycznego wyprostu kończyny dolnej. Nie zaobserwowano tego w grupie eksperymentalnej; dlatego postawiliśmy hipotezę, że może to wiązać się z prawidłową aktywacją mięśni podczas treningu z egzoszkieletem Ekso GT, w którym zachowana jest większa symetria wzoru chodu niż bez wsparcia robota. Dowiedziono, że chód z egzoszkieletem indukuje bardziej symetryczną aktywność mięśni kończyn dolnych, co jest porównywalne z chodzeniem fizjologicznym i może stymulować powrót do prawidłowego obciążenia kończyny (28, 29). Dlatego powyższe obserwacje mogą sugerować, że wzór obciążenia kończyny dolnej po rehabilitacji egzoszkieletem jest bardziej fizjologiczny.
W dostępnej literaturze nie ma badań, które oceniałyby zmiany równowagi między pacjentami rehabilitowanymi za pomocą egzoszkieletu. Większość autorów zgłosiła różne aspekty chodu (11, 13, 28, 30), a tylko kilka prac przedstawia pewne dane dotyczące zmian w równowadze, ale oparte wyłącznie na skalach subiektywnych, takich jak Skala Równowagi Berga (13, 14). Nie ma badań, w których zmiany równowagi wynikające z rehabilitacji egzoszkieletem byłyby badane przy użyciu obiektywnego narzędzia, takiego jak platforma stabilometryczna. Kubot i in. (14) u 38 pacjentów z zaburzeniami ruchowymi (w tym 12 pacjentów po udarze) ocenił równowagę za pomocą Skali równowagi Berga. Pacjentów rehabilitowano przy użyciu egzoszkieletu Hybrid Assistive Limb (HAL) przez 8 tygodni, dwa razy w tygodniu przez 90 minut. Po terapii zauważono poprawę równowagi, ale zmiana nie była znacząca. Ponadto w tym badaniu nie było grupy kontrolnej; w związku z tym nie można było porównać efektów interwencji (14). Podobne obserwacje zanotowali Kawamoto i in. (6), którzy zaobserwowali znaczną poprawę u 16 pacjentów po udarze w zakresie równowagi ocenianej za pomocą skali równowagi Berga po rehabilitacji egzoszkieletem HAL.
Terapia obejmowała 16 sesji trwających 20–30 minut, dwa razy w tygodniu. Chociaż poprawa równowagi w grupie badanej była znacząca, jednak brak grupy kontrolnej sprawił, że wyniki te nie były jednoznaczne. Badanie Yoshimoto i in. (30) wykazało znaczną poprawę w teście Timed Up and Go u pacjentów z przewlekłym udarem mózgu oraz w teście zasięgu funkcjonalnego i skali równowagi Berga po treningu w egzoszkieletie HAL (raz w tygodniu przez 8 tygodni, 20 minut na sesję). Grupa kontrolna przeszła konwencjonalną fizykoterapię z powodu zaburzeń chodu, ale nie zaobserwowano istotnych różnic w równowadze (30). Ponadto badania Hornby i in. (13) lub Hidler i in. (31), porównując wpływ konwencjonalnej rehabilitacji z leczeniem na robota Lokomat, nie wykazał żadnych istotnych różnic w równowadze ocenianej za pomocą skali Berga (13, 31) .
Zmiana równowagi oceniona za pomocą skali Berga (13, 14, 31) oraz w naszym własnym badaniu na platformie stabilometrycznej nie wykazała wyraźnie, która metoda terapii była bardziej skuteczna u pacjentów po udarze. Zauważyliśmy jednak pewne trendy pokazujące, że terapia z egzoszkieletem może być bardziej korzystna u niektórych pacjentów. Może to wskazywać, że aby poprawić równowagę, konieczne jest stymulowanie samego układu równowagi podczas terapii lub że czas trwania terapii powinien być dłuższy niż 4 tygodnie.
Pacjenci po udarze stanowią bardzo niejednorodną grupę pod względem możliwości funkcjonalnych. Stan ten zależy od wielkości udaru, zajętych obszarów mózgu, czasu, jaki upłynął od incydentu udaru mózgu i dotychczas przeprowadzonej rehabilitacji (1, 3). Głównymi celami leczenia u pacjentów po udarze są przywrócenie funkcji chwytnej kończyn górnych i poruszanie się. Dlatego istnieje bardzo niewiele badań oceniających ogólny stan funkcjonalny pacjentów po udarze poddawanych terapii urządzeniami wspomaganymi robotem (32).
Mayr i in. (32) ocenił wpływ treningu z robotem Lokomat z wykorzystaniem RMI i konwencjonalnego treningu z terapeutą na zmiany stanu funkcjonalnego pacjentów po udarze. Zaobserwowali większą poprawę u osób poddawanych terapii robotem niż u osób poddawanych klasycznej terapii.
W naszym badaniu znaczące zmiany po terapii wystąpiły w obu grupach; dlatego sugerujemy, że obie formy zastosowanej terapii prowadzą do poprawy stanu funkcjonalnego pacjentów. Jednak w grupie eksperymentalnej poprawę zaobserwowano w większej liczbie kategorii ocenianych za pomocą BI i RMI, co może sugerować potencjalnie większy wpływ treningu na poprawę funkcjonalną egzoszkieletu Ekso GT niż w przypadku klasycznej rehabilitacji. Niestety grupy w naszym badaniu różniły się istotnie w niektórych kategoriach zarówno w RMI, jak i BI na początku badania. Jednak pacjenci w grupie eksperymentalnej byli funkcjonalnie słabsi na początku; dlatego możliwe jest, że mieli większy potencjał poprawy, i dlatego ich przywrócenie stanu funkcjonalnego było lepsze niż w grupie kontrolnej.
Badania wykazały, że zastosowanie egzoszkieletu poprawia funkcję chodu u pacjentów po udarze (11, 25, 32–34). Nie można jednak jednoznacznie stwierdzić, że efekt terapeutyczny jest lepszy niż w przypadku klasycznych form rehabilitacji z fizjoterapeutą.W naszym badaniu zaobserwowano znaczną poprawę odległości marszu w egzoszkieletie podczas kolejnych sesji treningowych u pacjentów poddawanych terapii z egzoszkieletem Ekso GT, ale należy zauważyć, że zmierzono to podczas marszu z udziałem robota.Wśród dostępnej literatury, w niektórych pracach wyniki przemawiają za egzoszkieletami (28, 32, 34, 35), ale w innych konwencjonalna rehabilitacja wydaje się lepsza (13, 31). Istnieje również trzecia grupa badań, które podobnie jak nasza praca, nie pokazują wyraźnie przewagi jednej metody nad drugą (29). Badania kliniczne wykazały, że zasilane robotyczne egzoszkielety można
bezpiecznie stosować jako interwencję treningu chodu w przypadku udaru mózgu. Wstępne ustalenia sugerują, że trening chodu zewnątrzszkieletowego jest równoważny tradycyjnej terapii pacjentów z przewlekłym udarem mózgu, podczas gdy pacjenci podostrzy mogą doświadczyć dodatkowych korzyści z treningu chodu zewnątrzszkieletowego (12). Również systematyczny przegląd Bruni i in. (35) poparł zastosowanie terapii wspomaganej robotem u pacjentów po udarze, ale w połączeniu z konwencjonalną fizykoterapią. Podkreślili, że daje to możliwość przeprowadzenia bardziej intensywnego, powtarzalnego i zorientowanego na zadania treningu, niż byłoby to możliwe przy konwencjonalnym chodzeniu po ziemi samodzielnie (35).
Istnieją również pewne ograniczenia tego badania, którymi należy się zająć. Ze względu na charakter interwencji zaślepienie badanych nie było możliwe. Ponadto, pomimo losowej selekcji pacjentów, grupy były niejednorodne i różniły się niektórymi zmiennymi na początku; dlatego należy to wziąć pod uwagę podczas interpretacji wyników. Należy podkreślić, że pacjenci po udarze niedokrwiennym są bardzo zróżnicowani pod względem doświadczanych objawów, a także ich nasilenia.Więcej przedmiotów powinno prawdopodobnie zostać uwzględnionych w przyszłych badaniach, co może zminimalizować problem z heterogennością grupy. Głównymi celami leczenia u pacjentów po udarze są przywrócenie funkcji chwytnej kończyn górnych i poruszanie się. Ale brak bezpośredniego pomiaru zdolności chodzenia jest również ograniczeniem tego badania i zostanie to zbadane w dalszych
badaniach.
Wnioski
Na podstawie naszych wyników możemy stwierdzić, że zarówno 4 tygodnie terapii z egzoszkieletem Ekso GT, jak i 4 tygodnie konwencjonalnej rehabilitacji doprowadziły do poprawy stanu funkcjonalnego pacjentów po udarze niedokrwiennym. Jednak w grupie eksperymentalnej zaobserwowano poprawę w większej liczbie kategorii, co może sugerować potencjalnie większy wpływ na status funkcjonalny terapii z egzoszkieletem niż klasycznej rehabilitacji. Obie formy rehabilitacji spowodowały również znaczące zmiany w równowadze, ale zauważyliśmy pewne trendy wskazujące, że terapia z egzoszkieletem może być bardziej korzystna u niektórych pacjentów. Przeniesienie obciążenia z przedniej części stopy na tylną części stopy obserwowane w grupie kontrolnej było zjawiskiem niekorzystnym. Ponieważ tej grupy nie zaobserwowano w grupie eksperymentalnej, może to sugerować większą skuteczność terapeutyczną egzoszkieletu w stosunku do klasycznej rehabilitacji. Sugerujemy, że egzoszkielet Ekso GT może być obiecującym narzędziem w rehabilitacji pacjentów po udarze.
Oświadczenie o dostępności danych
Zestawy danych wykorzystane i / lub przeanalizowane podczas bieżącego badania są dostępne od odpowiedniego autora na uzasadnione żądanie.
Oświadczenie o etyce
Badanie zostało zatwierdzone przez Komitet Etyczny Regionalnej Izby Lekarskiej w Krakowie (77 /KBL / OLI / 2014). Przed uczestnictwem wszyscy uczestnicy otrzymali szczegółowy opis badania, mieli możliwość zadawania pytań i podpisali pisemną świadomą zgodę.
Wkłady autorskie
Koncepcja i projekt badania, rekrutacja pacjentów, zarządzanie kliniczne, zbieranie danych, wyszukiwanie literatury, interpretacja danych oraz pisanie i edycja manuskryptu. AM: koncepcja i projekt badania, wyszukiwanie literatury, zarządzanie kliniczne, analizy i interpretacja danych, analizy statystyczne oraz pisanie i edycja manuskryptu. ŁO: koncepcja i projekt badania, wyszukiwanie literatury, zarządzanie kliniczne, interpretacja danych i edycja manuskryptu. AS i RK: studium koncepcji i projektu, interpretacja danych i edycja manuskryptu.
Finansowanie
Badanie zostało przeprowadzone w ramach programu Ministra Nauki i Szkolnictwa Wyższego pod nazwą Regionalna inicjatywa na rzecz doskonałości w latach 2019–2022, projekt nr 022 / RID / 2018/19, wspierany przez Narodowe Centrum Nauki w Polska.
Konflikt interesów
Autorzy deklarują, że badanie zostało przeprowadzone przy braku jakichkolwiek powiązań handlowych lub finansowych, które można by interpretować jako potencjalny konflikt interesów.
Skróty
COP, środek ciężkości; RMI, wskaźnik mobilności Rivermead; BI, indeks Barthel.
Przypisy dolne
1. ^ Instrukcja obsługi EKSO GT, Ekso Bionics, USA.
Referencje
2. Mudge S, Stott N. Outcome measures to asses walking ability following after stroke: a systematic review of the literature. Physiotherapy. (2007) 93:189–200. doi: 10.1016/j.physio.2006.12.010 CrossRef Full Text | Google Scholar
3. Georgakis MK, Duering M,Wardlaw JM, Dichgans M.WMH and long-term outcomes in ischemic stroke: a systematic review and meta-analysis. Neurology. (2019) 92:e1298–308. doi: 10.1212/WNL.0000000000007142 PubMed Abstract | CrossRef Full Text | Google Scholar
4. Stephenson R, Edwards S, Freeman J. Associated reactions, their value in clinical practice. Physiother Res Int. (1998) 3:151–2. doi: 10.1002/pri.123 CrossRef Full Text | Google Scholar
5. Michael KM, Allen JK, Macko RF. Reduced ambulatory activity after stroke: the role of balance, gait, and cardiovascular fitness. Arch Phys Med Rehabil. (2005) 86:1552–6. doi: 10.1016/j.apmr.2004.12.026 PubMed Abstract | CrossRef Full Text | Google Scholar
6. Kawamoto H, Kamibayashi K, Nakata Y, Yamawaki K, Ariyasu R, Sankai Y. Pilot study of locomotion improvement using hybrid assistive limb in chronic stroke patients. BMC Neurol. (2013) 7:141. doi: 10.1186/1471-2377-13-141 CrossRef Full Text | Google Scholar
7. Park J, Kim TH. The effects of balance and gait function on quality of life of stroke patients. Neuro Rehabilitation. (2019) 44:37–41. doi: 10.3233/NRE-182467
PubMed Abstract | CrossRef Full Text | Google Scholar
8. Collin C,Wade DT, Davies S, Horne V. The barthel ADL index: a reliability study. Int Disabil Stud. (1998) 10:61–3. doi: 10.3109/09638288809164103 PubMed Abstract | CrossRef Full Text | Google Scholar
9. Green J, Forster A, Young J. A test-retest reliability study of the Barthel Index, the Rivermead Mobility Index, the Nottingham Extended Activities of Daily Living Scale and the Frenchay Activities Index in stroke patients. Disabil Rehabil. (2001) 23:670–6. doi: 10.1080/09638280110045382 PubMed Abstract | CrossRef Full Text | Google Scholar
10. Molteni F, Gasperini G, Gaffuri M, Colombo M, Giovanzana C, Lorenzon C, et al.Wearable robotic exoskeleton for overground gait training in sub-acute and chronic hemiparetic stroke patients: preliminary results. Eur J Phys Rehabil Med. (2017) 53:676–84. doi: 10.23736/S1973-9087.17.04591-9 PubMed Abstract | CrossRef Full Text | Google Scholar
11. Jayaraman A, O’Brien MK, Madhavan S, Mummidisetty CK, Roth HR, Hohl K, et al. Stride management assist exoskeleton vs functional gait training in stroke: a randomized trial. Neurology. (2019) 92:e263–73. doi: 10.1212/WNL.0000000000006782 PubMed Abstract | CrossRef Full Text | Google Scholar
12. Louie DR, Eng JJ. Powered robotic exoskeletons in post stroke rehabilitation of gait: a scoping review. J Neuroeng Rehabil. (2016) 13:53. doi: 10.1186/s12984-016-0162-5 PubMed Abstract | CrossRef Full Text | Google Scholar
13. Hornby TG, Campbell DD, Kahn JK, Demott T, Moore JL, Roth HR. Enhanced gait-related improvements after therapist- versus robotic-assisted locomotor training in subjects with chronic stroke: a randomized controlled study. Stroke. (2008) 39:1786–92. doi: 10.1161/STROKEAHA.107.504779 PubMed Abstract | CrossRef Full Text | Google Scholar
14. Kubota S, Nakata Y, Eguchi K, Kawamoto H, Kamibayashi K, Sakane M, et al. Feasibility of rehabilitation training with a newly developed wearable robot for patients with limited mobility. Arch Phys Med Rehabil. (2013) 94:1080–7. doi: 10.1016/j.apmr.2012.12.020 PubMed Abstract | CrossRef Full Text | Google Scholar
15. Forlander DA, Bohannon RW. Rivermead Mobility Index: a brief review of research to date. Clin Rehabil. (1999) 13:97– 100. doi: 10.1191/026921599675502264 PubMed Abstract | CrossRef Full Text | Google Scholar
16. Collen FM,Wade DT, Robb GF, Bradshaw CM. The Rivermead Mobility Index: a further development of the Rivermead Motor Assessment. Int Disabil Stud. (1991) 13:50–4. doi: 10.3109/03790799109166684 PubMed Abstract | CrossRef Full Text | Google Scholar
17. Radman L, Forsberg A, Nilsagard Y. Modified Rivermead Mobility Index: a reliable measure in people within 14 days post-stroke. Physiother Theory Pract. (2015) 31:126–9. doi: 10.3109/09593985.2014.960055 PubMed Abstract | CrossRef Full Text | Google Scholar
18. Lennon S, Johnson L. The modified rivermead mobility index: validity and reliability. Disabil Rehabil. (2000) 22:833–9. doi: 10.1080/09638280050207884
PubMed Abstract | CrossRef Full Text | Google Scholar
19. Mahoney FI, Barthel D. Functional evaluation: the Barthel Index: a simple index of independence useful in scoring improvement in the rehabilitation of the chronically ill. Md State Med J. (1965) 14:56–61. Google Scholar
20. Shah S, Vanclay F, Cooper B. Improving the sensitivity of the Barthel Index for stroke rehabilitation. J Clin Epidemiol. (1989) 42:703–9. doi: 10.1016/0895-4356(89)90065-6
PubMed Abstract | CrossRef Full Text | Google Scholar
21. Ohura T, Hase K, Nakajima Y, Nakayama T. Validity and reliability of a performance evaluation tool based on the modified Barthel Index for stroke patients. BMC Med Res Methodol. (2017) 17:131. doi: 10.1186/s12874-017-0409-2 PubMed Abstract | CrossRef Full Text | Google Scholar
22. Tryon WW. Evaluating statistical difference, equivalence, and indeterminacy using inferential confidence intervals: an integrated alternative method of conducting null hypothesis statistical tests. Psychol Methods. (2001) 6:371–86. doi: 10.1037/1082-989X.6.4.371 PubMed Abstract | CrossRef Full Text | Google Scholar
23. Nakagawa S, Cuthill IC. Effect size, confidence interval and statistical significance: a practical guide for biologists. Biol Rev Camb Philos Soc. (2007) 82:591–605. doi: 10.1111/j.1469-185X.2007.00027.x PubMed Abstract | CrossRef Full Text | Google Scholar
24. Dunst CJ, Hamby DW. Guide for calculating and interpreting effect sizes and confidence intervals in intellectual and developmental disability research studies. J Intellect Dev Disabil. (2012) 37:89–99. doi: 10.3109/13668250.2012.673575 PubMed Abstract | CrossRef Full Text | Google Scholar
25. Nam YG, Lee JW, Park JW, Lee HJ, Nam KY, Park JH, et al. Effects of electromechanical exoskeleton-assisted gait training on walking ability of stroke patients: a randomized controlled trial. Arch Phys Med Rehabil. (2019) 100:26–31. doi: 10.1016/j.apmr.2018.06.020 PubMed Abstract | CrossRef Full Text | Google Scholar
26. Morone G, Bragoni M, Iosa M, De Angelis D, Venturiero V, Coiro P, et al.Who may benefit from robotic assisted gait training? A randomized clinical trial in patients with subacute stroke. Neurorehabil Neural Repair. (2011) 25:636–644. doi: 10.1177/1545968311401034 PubMed Abstract | CrossRef Full Text | Google Scholar
27. Pomarino D, Pomarino A. Plantar static pressure distribution in healthy individuals: percentiles for the evaluation of forefoot loading. Foot Ankle Spec. (2014) 7:293–7. doi: 10.1177/1938640014528973 PubMed Abstract | CrossRef Full Text | Google Scholar
28. Coenen P, van Werven G, van Neunen MP, van Dieen JH, Gerrits KH, Janssen TW. Robot-assisted walking vs overground walking in stroke patients: an evaluation of muscle activity. J Rehabil Med. (2012) 44:331–7. doi: 10.2340/16501977-0954 PubMed Abstract | CrossRef Full Text | Google Scholar
29. Husemann B, Muller F, Krewer C, Heller S, Koenig E. Effects of locomotion training with assistance of a robot-driven gait orthosis in hemiparetic patients after stroke: a randomized controlled pilot study. Stroke. (2007) 38:349–54. doi: 10.1161/01.STR.0000254607.48765.cb PubMed Abstract | CrossRef Full Text | Google Scholar30. Yoshimoto T, Shimizu I, Hiroi Y, Kawaki M, Sato D, Nagasawa M. Feasibility and efficacy of high-speed gait training with a voluntary driven exoskeleton robot for gait and balance dysfunction in patients with chronic stroke: nonrandomized pilot study with concurrent control. Int J Rehabil Res. (2015) 38:338–43. doi: 10.1097/MRR.0000000000000132 PubMed Abstract | CrossRef Full Text | Google Scholar
31. Hidler J, Nicholson D, PelliccioM, Brady K, Campbell DD, Kahn JH, et al. Multicenter randomized clinical trial evaluating the effectiveness of the Lokomat in subacute stroke. Neurorehabil Neural Repair. (2009) 23:5–13. doi: 10.1177/1545968308326632 PubMed Abstract | CrossRef Full Text | Google Scholar
32. Mayr A, Kofler M, Quirbach E, Matzak H, Frohlich K, Saltuari L. Prospective, blinded, randomized crossover study of gait rehabilitation in stroke patients using the Lokomat gait orthosis. Neurorehabil Neural Repair. (2007) 21:307–14. doi: 10.1177/1545968307300697 PubMed Abstract | CrossRef Full Text | Google Scholar
33. Nilsson A, Vreede KS, Haglund V, Kawamoto H, Sankai Y, Borg J. Gait training early after stroke with a new exoskeleton– the hybrid assistive limb: a study of safety and feasibility. J Neuroeng Rehabil. (2014) 11:92. doi: 10.1186/1743-0003-11-92 PubMed Abstract | CrossRef Full Text | Google Scholar
34.Watanabe H, Tanaka N, Inuta T, Saitou H, Yanagi H. Locomotion improvement using a hybrid assistive limb in recovery phase stroke patients: a randomized controlled pilot study. Arch Phys Med Rehabil. (2014) 95:2006–12. doi: 10.1016/j.apmr.2014.07.002 PubMed Abstract | CrossRef Full Text | Google Scholar
35. Bruni MF, Melegari C, De ColaMC, Bramanti A, Bramanti P, Calabrò RS.What does best evidence tell us about robotic gait rehabilitation in stroke patients: a systematic review and meta-analysis. J Clin Neurosci. (2018) 48:11–7. doi: 10.1016/j.jocn.2017.10.048 PubMed Abstract | CrossRef Full Text | Google Scholar
Słowa kluczowe: udar niedokrwienny, egzoszkielet, fizjoterapia, równowaga, rozkład obciążenia, stan funkcjonalny.
Cytowanie: Rojek A, Mika A, Oleksy Ł, Stolarczyk A and Kielnar R (2020) Effects of Exoskeleton Gait Training on Balance, Load Distribution, and Functional Status in Stroke: A Randomized Controlled Trial. Front. Neurol. 10:1344. doi: 10.3389/fneur.2019.01344
Otrzymano: 04 sierpnia 2019; Przyjęto: 05 grudnia 2019;
Opublikowano: 15 stycznia 2020.
Edytowany przez: Margit Alt Murphy, University of Gothenburg, Szwecja.
Zrecenzowany przez: Janita Pak Chun Chau, The Chinese University of Hong Kong, China Marco Iosa, Santa Lucia Foundation (IRCCS), Włochy.
Prawo autorskie © 2020 Rojek, Mika, Oleksy, Stolarczyk i Kielnar. To jest artykuł o otwartym dostępie rozpowszechniany na warunkach licencji Creative Commons Attribution
License (CC BY). Wykorzystywanie, rozpowszechnianie lub powielanie na innych forach jest dozwolone, pod warunkiem że autorzy oryginalni i właściciele praw autorskich są uznani,
a cytowana jest oryginalna publikacja w tym czasopiśmie, zgodnie z przyjętą praktyką akademicką. Niedozwolone jest wykorzystanie, rozpowszechnianie lub powielanie, które nie
jest zgodne z tymi warunkami.
* Korespondencja: Anna Mika, Ten adres pocztowy jest chroniony przed spamowaniem. Aby go zobaczyć, konieczne jest włączenie w przeglądarce obsługi JavaScript.
** Ci autorzy w równym stopniu przyczynili się do tej pracy i dzielą pierwsze autorstwo








